怎么识别网站是用什么语言做的潍坊seo排名
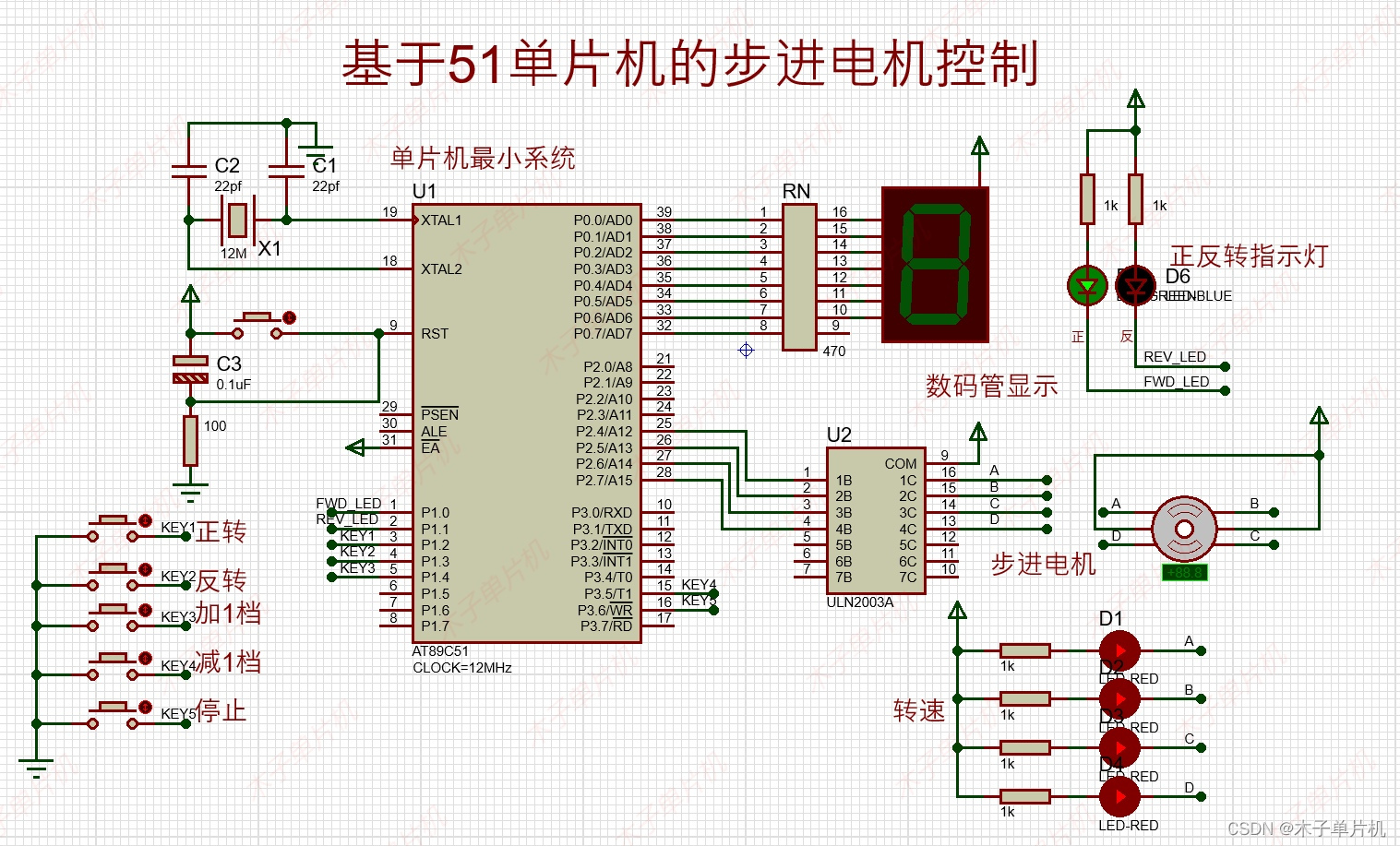
基于51单片机的步进电机调速系统
(仿真+程序+原理图+设计报告)
功能介绍
具体功能:
1.按键可以控制电机正、反转,加、减速,停止;
2.一位7段数码管实时显示档位(共9档);
3.两个LED分别来表示正转、反转;
4.四个LED流水闪烁来表示电机转速;
演示视频:
基于51单片机的步进电机调速系统设计

#include "reg52.h"
/*
按键控制步进电机:正转、反转、加1档、减1档、停止
数码管显示步进电机档位,总共有9档
LED灯显示正转、反转、转速
*//*宏定义*/
#define SpeedShow P0 //数码管显示接口
#define MotorDriver P2 //步进电机驱动接口typedef unsigned char uchar; // 8位有符号整数
typedef unsigned int uint; //16位有符号整数
typedef unsigned long ulong; //32位有符号整数#define KEY_TIME_SHORT 20 //短按的按键去抖动延时的时间
//---加入全局变量--//
extern uchar KeyCode;
extern uint KeyTimeCnt[5]; //按键去抖动延时计数器,分别对应KEY1/2/3/4/5
extern uchar KeyLock[5]; //按键触发后自锁的变量标志,分别对应KEY1/2/3/4/5//-----------------------------------------------------------------
// 相关函数声明
//-----------------------------------------------------------------
void KeyScan(); //按键扫描函数 放在定时中断里
void Delay10ms(); //延时函数//0~9 的共阳数码管段码,最后一个是黑屏
const uchar SEG_CODE[] = {0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90,0xFF};//输出励磁序列的频率参数{TH1,TL1}
const uchar Timer[9][2]={{0xDE,0xE4},{0xE1,0xEC},{0xE5,0xD4},{0xE9,0xBC}, //8.476 ~ 1ms{0xEd,0xA4},{0xF1,0x8C},{0xF5,0x74},{0xF9,0x5C},{0xFC,0x18}};//步进电机正转的励磁序列
const uchar FFW[] = {0x1F,0x3F,0x2F,0x6F,0x4F,0xCF,0x8F,0x9F}; //DCBAXXXX//步进电机反转的励磁序列
const uchar REV[] = {0x9F,0x8F,0xCF,0x4F,0x6F,0x2F,0x3F,0x1F}; //DCBAXXXX//枚举变量--正反转标志
typedef enum{FwdRun, RevRun} RunFlag;
RunFlag flag1 = FwdRun;uchar speed = 0;uchar KeyCode = 0; //按键编码值//共5个独立机械按键,通过短按实现5种按键编码值
uint KeyTimeCnt[5] = {0,0,0,0,0}; //按键去抖动延时计数器,分别对应KEY1/2/3/4/5
uchar KeyLock[5] = {0,0,0,0,0}; //按键触发后自锁的变量标志,分别对应KEY1/2/3/4/5/* IO引脚分配*/
sbit KEY1 = P1^2; //按键1
sbit KEY2 = P1^3; //按键2
sbit KEY3 = P1^4; //按键3
sbit KEY4 = P3^5; //按键4
sbit KEY5 = P3^6; //按键5sbit FWD_LED = P1^0; //正转指示灯
sbit REV_LED = P1^1; //反转指示灯//函数声明
void T0_Init(); //定时器0初始化函数声明
void T1_Init(); //定时器1初始化函数声明
void KeyService(); //按键服务函数声明
void delay_ms(uint t); //毫秒延时函数声明//-----------------------------------------------------------------
// 主程序
//-----------------------------------------------------------------
void main()
{ T0_Init(); //定时器0初始化T1_Init(); //定时器1初始化FWD_LED = 0; //正转指示灯亮,默认初始化是正转delay_ms(500); //延时500ms,待各个模块上电稳定EA = 1; //开启中断while(1){ KeyService(); //按键服务程序}
} //-----------------------------------------------------------------
// Timer0 初始化,模式1,允许中断,1ms定时
// Timer0 用于按键扫描
//-----------------------------------------------------------------
void T0_Init()
{TMOD &= 0xF0;TMOD |= 0x01; //T0工作于模式1,16位定时器TH0 = (65536 - 1000) >> 8; //1ms定时TL0 = (65536 - 1000) & 0xFF;ET0 = 1; //允许T0中断TR0 = 1; //启动T0
}//-----------------------------------------------------------------
// Timer1 初始化,模式1,允许中断
// Timer1 用于改变步进电机转速
//-----------------------------------------------------------------
void T1_Init()
{TMOD &= 0x0F;TMOD |= 0x10; //定时器1工作于模式1,16位定时器TH1 = Timer[speed][0];TL1 = Timer[speed][1]; //定时器1,定时用于步进电机转速控制ET1 = 1; //允许T1中断PT1 = 1; //定时器1优先级高TR1 = 0; //关闭定时器1
}//-----------------------------------------------------------------
// Timer0 中断服务程序
//-----------------------------------------------------------------
void InterruptTime0() interrupt 1
{TH0 = (65536 - 1000) >> 8; //1msTL0 = (65536 - 1000) & 0xFF;KeyScan(); //按键扫描
}//-----------------------------------------------------------------
// Timer1 中断服务程序
//-----------------------------------------------------------------
void InterruptTime1() interrupt 3
{static step1 = 0; static step2 = 0;TH1 = Timer[speed - 1][0]; //根据不同的转速档位,给定时器1赋定时器值TL1 = Timer[speed - 1][1]; //按照定时器1的频率循环发送正转励磁序列的脉冲给步进电机,使其不停地转动if(flag1 == FwdRun)//正转{MotorDriver = FFW[step1++]; if(step1 == 8) step1 = 0; }//按照定时器1的频率循环发送反转励磁序列的脉冲给步进电机,使其不停地转动else if(flag1 == RevRun) {MotorDriver = REV[step2++];if(step2 == 8) step2 = 0; }
}//-----------------------------------------------------------------
// 按键服务程序
//-----------------------------------------------------------------
void KeyService()
{switch (KeyCode){case 1: flag1 = FwdRun; //正转FWD_LED = 0; REV_LED = 1; //正转指示灯亮KeyCode = 0;break; case 2: flag1 = RevRun; //反转FWD_LED = 1; REV_LED = 0; //反转指示灯亮KeyCode = 0;break;case 3: speed++; //速度加if(speed == 10) speed = 1; SpeedShow = SEG_CODE[speed];if(TR1 == 0) TR1 = 1;KeyCode = 0;break;case 4: speed--; //速度减if(speed == 0 || speed == -1 ) speed = 9;SpeedShow = SEG_CODE[speed]; if(TR1 == 0) TR1 = 1; KeyCode = 0;break;case 5: TR1 = 0; //停止SpeedShow = 0xFF;MotorDriver = 0x00;KeyCode = 0;break; default: ;}
}硬件设计
使用元器件:
单片机:STC89C52;
(注意:单片机是通用的,无论51还是52、无论stc还是at都一样,引脚功能都一样。程序也是一样的。)
万用板9*15;DC电源插口;
自锁开关;2.2K电阻*7;
40脚IC座;钮扣电池;
电池座;10uF电容;
ULN2003驱动芯片;
1位7段LED数码管;
10K排阻(103);
10K电阻*1;按键*6;
30Pf瓷片电容*2;
DC-5V步进电机;
12M晶振;导线:若干;
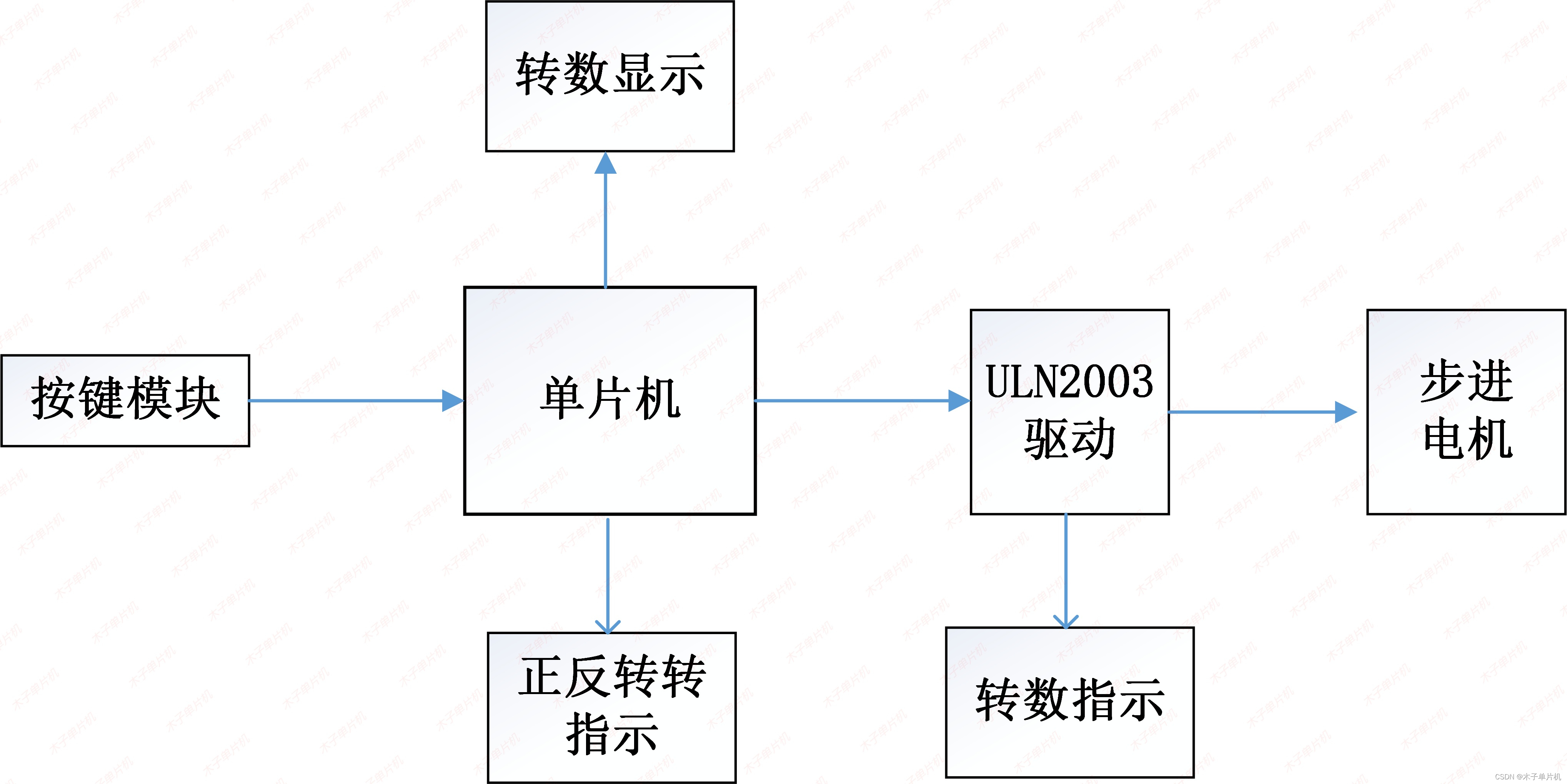
结构图:
设计资料
01 仿真图
本设计使用proteus8.9版本设计,资料里有安装教程,无需担心!具体如图!

02 原理图
本系统原理图采用Altium Designer19设计,具体如图!

03 程序
本设计使用软件keil5版本编程设计,资料里有安装教程,无需担心!具体如图!

04 设计报告
五千字设计报告,具体如下!
05 设计资料
资料获取请关注同名公众号,全部资料包括仿真源文件 、程序(含注释)、AD原理图、参考论文、实物图、流程图、任务书、元件清单、讲解视频等。具体内容如下,全网最全! !
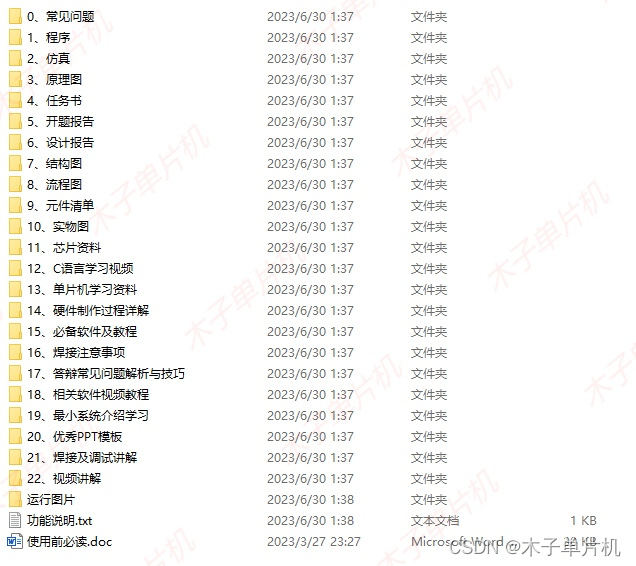
资料获取请观看前面演示视频!
点赞分享一起学习成长。